
En la última década, los vehículos de guiado automático (AGV) han dejado de ser robots rígidos con funciones limitadas para convertirse en sistemas inteligentes y adaptables, capaces de gestionar flujos de materiales complejos. Impulsados por la integración con los entornos de Industria 4.0, los avances en tecnologías de navegación han sido clave en esta evolución, permitiendo que los AGV operen con niveles sin precedentes de precisión, flexibilidad y escalabilidad.
De rutas fijas a inteligencia adaptativa
Actualmente, usted puede elegir entre diversas tecnologías de navegación AGV, según el entorno operativo, los requisitos específicos del proyecto y el presupuesto disponible.
Las tecnologías de navegación basadas en infraestructuras físicas, como cintas magnéticas, cables o marcadores reflectantes (utilizados en la guía láser), resultan adecuadas para entornos estructurados y tareas repetitivas, como en las líneas de montaje.
Sin embargo, los avances recientes en triangulación láser, navegación natural (SLAM – localización y mapeo simultáneos) y sensores LiDAR han transformado la autonomía de los AGV. Estas tecnologías permiten la navegación sin rutas predefinidas, lo que les permite adaptarse en tiempo real a los obstáculos y operar con eficiencia en entornos dinámicos y complejos.
Principales avances tecnológicos
- Guía láser: anteriormente limitada a entornos interiores, ahora se complementa con sistemas híbridos como dGPS, lo que permite transiciones fluidas entre espacios interiores y exteriores.
- Navegación natural: tecnologías como SLAM y LiDAR permiten a los AGV construir mapas tridimensionales del entorno, evitar colisiones y redefinir rutas de forma dinámica. Esta solución reduce la dependencia de infraestructuras físicas, disminuyendo los costos de instalación y facilitando el uso de AGV en espacios no estructurados.
- Sistemas híbridos: mediante la combinación de puntos magnéticos, GPS y sensores inerciales, los AGV híbridos operan con eficiencia en entornos mixtos. Por ejemplo, en patios logísticos exteriores, se utiliza GPS para obtener una cobertura amplia, mientras que en interiores se recurre a marcadores magnéticos para garantizar mayor precisión.
- Integración con IA e IoT: los AGV de última generación emplean mantenimiento predictivo, análisis de datos en tiempo real y conectividad mediante IoT para optimizar los flujos de trabajo. Por ejemplo, los sensores monitorean el estado de la batería y la congestión del entorno para reducir los tiempos de inactividad.
La navegación AGV ha evolucionado desde sistemas rígidos y dependientes de infraestructuras hacia soluciones inteligentes y adaptativas. Al combinar la precisión de la guía láser, la flexibilidad del SLAM y la escalabilidad de los sistemas híbridos, los AGV modernos están transformando la gestión de materiales en una amplia variedad de sectores industriales.
EVALUACIÓN Y ANÁLISIS
Seleccionar la tecnología de navegación AGV más adecuada requiere equilibrar diversos factores, como el costo del vehículo, los gastos de instalación, la posibilidad de realizar futuras modificaciones, así como la precisión, fiabilidad, adaptabilidad y escalabilidad del sistema.
A continuación, se presenta un análisis comparativo de las principales tecnologías disponibles — inductiva, óptica, natural, GPS, por etiquetas/transpondedores y por triangulación láser — con el objetivo de ayudarle a optimizar los procesos de manejo de cargas pesadas.
1. GUIADO INDUCTIVO (CABLE)
Funcionamiento: los AGV se desplazan siguiendo cables conductores instalados en el suelo, con los cuales se comunican mediante señales de radio.
Rendimiento en interiores
- Ventajas:
- No se ven afectados por polvo, humo ni variaciones en la iluminación.
- Ofrecen buena precisión (±5 mm), adecuada para tareas repetitivas y de gran carga (por ejemplo, más de 200 toneladas).
- Desventajas:
- Requieren rutas fijas; cualquier modificación implica obras costosas y la instalación de nueva infraestructura.
- Presentan baja escalabilidad, especialmente en operaciones con múltiples vehículos.
Uso en exteriores:
- Su aplicación es limitada, ya que los cables son vulnerables a las condiciones climáticas y al tránsito pesado.
Análisis de costes:
- Costo inicial: medio.
- Modificaciones: alto (requiere corte del pavimento y tiempos de inactividad).
Adecuación para flotas múltiples:
- Recomendada únicamente para recorridos altamente estructurados con escasa necesidad de cambios.
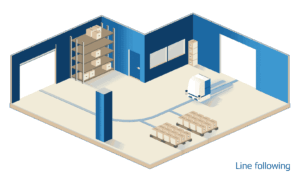
2. GUIADO ÓPTICO (LÍNEA / CINTA)
Funcionamiento: los AGV se desplazan siguiendo líneas pintadas, cintas magnéticas o adhesivos colocados sobre el suelo.
Rendimiento en interiores
- Ventajas:
- Bajo costo inicial.
- Instalación sencilla, sin necesidad de perforar el suelo.
- Desventajas:
- Alto nivel de desgaste; requiere reemplazo frecuente.
- Precisión media (±10 mm), susceptible a interferencias por suciedad o residuos.
Uso en exteriores:
- No se recomienda debido a la vulnerabilidad frente a las condiciones climáticas.
Análisis de costes:
- Costo inicial: bajo.
- Modificaciones: elevadas; los reajustes requieren intervenciones manuales y paradas operativas.
Adecuación para flotas múltiples:
- Limitada; riesgo de congestión y menor eficiencia en operaciones con varias unidades.
3. NAVEGACIÓN NATURAL (SLAM / LIDAR)
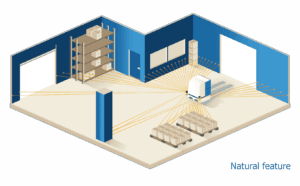
Funcionamiento: los AGV mapean su entorno utilizando sensores LiDAR, cámaras o algoritmos SLAM.
Rendimiento en interiores/exteriores
- Ventajas:
- No requiere infraestructura física adicional.
- Capacidad para evitar obstáculos y redefinir rutas de forma dinámica.
- Alta escalabilidad para flotas múltiples.
- Desventajas:
- Precisión moderada (±10 mm).
Análisis de costes:
- Costo inicial: medio.
- Modificaciones: bajo costos, ya que los ajustes se realizan por software.
Adecuación para flotas múltiples:
- Altamente recomendable en entornos cambiantes y dinámicos, donde se requiere flexibilidad operativa.
4. GPS (HÍBRIDO CON dGPS)
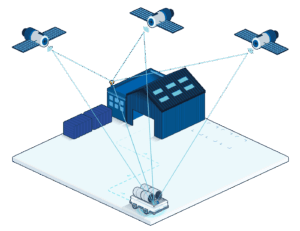
Funcionamiento: combina tecnología GPS con sensores inerciales para permitir la navegación en entornos exteriores.
Rendimiento en exteriores
- Ventajas:
- Amplia cobertura, ideal para operaciones en puertos, patios logísticos u otras áreas extensas.
- Bajos costos de modificación, ya que las rutas pueden ajustarse virtualmente sin intervención física.
- Desventajas:
- Baja precisión (±100 mm).
- Fiabilidad limitada en zonas con señal satelital débil o interferencias.
Análisis de costes:
- Costo inicial: alto, debido a la necesidad de sensores integrados avanzados.
- Modificaciones: bajo.
Adecuación para flotas múltiples:
- Recomendable para flotas que operan en exteriores con trayectorias simples y bien definidas.
5. TRIANGULACIÓN LÁSER
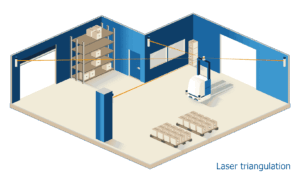
Funcionamiento: los AGV se posicionan mediante escáneres láser que interactúan con reflectores instalados en techos o paredes del entorno.
Rendimiento en interiores
- Ventajas:
- Alta precisión (±5 mm).
- Posibilidad de gestión centralizada del tráfico para múltiples vehículos.
- Desventajas:
- Requiere una instalación inicial costosa debido a la colocación de reflectores.
- Es susceptible a interferencias causadas por obstáculos que obstruyen la visibilidad de los reflectores.
Uso en exteriores:
- Aplicable únicamente en áreas cubiertas, como muelles techados o almacenes cerrados.
Análisis de costes:
- Costo inicial: alto.
- Modificaciones: medio, ya que implica ajustes de software y posible reubicación de reflectores.
Adecuación para flotas múltiples:
- Altamente recomendable para tareas de alta precisión, como en el caso de carretillas elevadoras automatizadas.
TABLA COMPARATIVA DE TECNOLOGÍAS
| Factor | Inductivo | Óptico | Natural | GPS | Láser |
| Precisión en interiores | Buena | Media | Media | Baja | Buena |
| Rendimiento en exteriores | Media | Baja | Buena | Alta | Baja |
| Costo inicial | $$$ | $ | $ | $$ | $$$ |
| Costo de modificación | $$$ | $$ | $ | $ | $$ |
| Adaptabilidad a flotas AGV | Baja | Baja | Alta | Media | Alta |
Navegación AGV: cada entorno operativo cuenta con una solución adecuada
En resumen:
- Combine sistemas inductivos o de triangulación láser para tareas que requieran alta precisión.
- Utilice navegación natural para entornos dinámicos y de alta flexibilidad.
- Implemente tecnologías GPS o con etiquetas para operaciones al aire libre y a gran escala.
- Priorice soluciones actualizables mediante software (como SLAM), con el fin de asegurar la evolución y escalabilidad del sistema.
El equipo de diseño de proyectos de Morello está a su disposición para asesorarle en la selección de la tecnología de navegación más adecuada, así como en el diseño del hardware necesario para alcanzar sus objetivos operativos.
La tecnología — o combinación de tecnologías — más apropiada será propuesta por el equipo de ingeniería de Morello, en función de las características específicas de su planta.
La evaluación final considerará factores como la precisión requerida, la fiabilidad del sistema, las condiciones ambientales y el presupuesto disponible.